|
For traffic control of positional information of avatars, objects,
and fighters, we can use the function of dead-reckoning.
Especially, since a haptic MU including the positional information
of objects is input/output every millisecond (i.e., at a rate of 1 kHz),
the function is very important.
In dead-reckoning, the position of each object is predicted.
There exist several prediction methods.
For simplicity, we show an example in the first-order prediction
in the following figure.
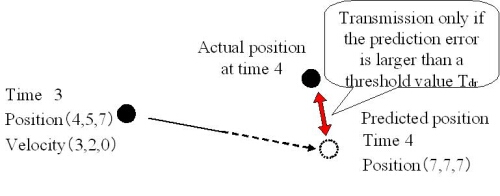 |
| An example in the first-order prediction. |
In this figure, we predict the position of a flying ball.
In the first-order prediction, we calculate the predicted position
by using the position included in the last received (or transmitted) MU
and the velocity calculated with the positional information
included in the latest two transmitted (or received) MUs.
That is, (the predicted position) = (the last position) + (the velocity) x (the elapsed time).
Then, we compare the predicted position with the actual position.
If the difference between the predicted position and the actual position
(i.e., the prediction error) is larger than a threshold value (Tdr),
the information on the actual position is transmitted as an MU.
Then, the convergence technique is used.
Otherwise, the information is not transmitted at the time.
In the convergence technique, when an MU is received (or transmitted),
we correct the position over K ms (K is larger than or equal to 1)
in order to correct the position gradually.
This is because if we correct the position at a time,
the output quality may deteriorate seriously.
We show an example in the convergence in the following figure.
 |
| An example in the convergence. |
In this figure, the prediction error becomes larger than the threshold Tdr,
the actual position is transmitted.
Then, the convergence is carried out at several times.
At the 8th MU, the ball is output at the predicted position.
|