Research on Networked Multimedia
≫ English page
分散マルチメディア
|
インターネットを用いたマルチメディア通信会議,遠隔教育,分散仮想環境における協調作業,及びネットワーク型ゲーム等の分散マルチメディアアプリケーションに対する要求が高まっています. |
触覚メディアを用いた協調作業
|
触覚インタフェース装置を用いて,3次元仮想空間内のオブジェクトに触り,遠隔設計や手術シミュレーション等の協調作業を行います.触覚メディアと音声やビデオを併用することによって,作業効率が大きく改善されることが期待されます.
従来の研究の多くは,3次元仮想空間内のオブジェクト数が少なく,単純な作業を扱っています.そこで,本研究では,複数のオブジェクト(26個の積み木)からなる積み木遊びを検討対象としています.協調作業として,二人で一緒に持って積み上げる場合,別々に交互に持って積み上げる場合,手渡して積み上げる場合の三通りを扱います.そして,ネットワーク遅延揺らぎとパケット欠落が協調作業のしやすさに及ぼす影響を主観評価と客観評価より調査します.下の図では,二人の利用者が触覚インタフェース装置を用いて,3次元仮想空間内にばらばらに配置された積み木を一緒に協力しながら積み上げ,家を組み立ている様子を示しています.
今後,さらに多様なアプリケーションを研究対象とする予定です. |


触覚を利用した遠隔制御システム
|
一つの触覚インタフェース装置を用いて,遠隔にある別の触覚インタフェース装置を制御します.
そのようなシステムの例として,遠隔教育システム(遠隔習字システム, 遠隔描画教示システム, 遠隔ペン習字システム)及び遠隔制御システムを扱っています.
遠隔描画教示システムは,先生と生徒がインタラクティブに力覚を共有できるようになっており,絵画や図形の描き方等を教示します.生徒だけでなく,先生も相互に画筆の動きを触感することができますので,高効率な運筆の誘導を可能とします.
遠隔ペン習字システムでは, 下図に示すように, 両端末の触覚インタフェース装置にホワイトボードマーカーを取り付けており,
先生が生徒の端末の触覚インタフェース装置を遠隔制御することにより, 文字や図形などの書き(描き)方の教示を行います.
先生と生徒は互いに文字や図形を書いて(描いて)いるところをビデオで見ながら教示を行います.
遠隔制御システムでは, マスタ端末の触覚インタフェース装置を用いてスレーブ端末の触覚インタフェース装置を遠隔制御し, 文字や図形を書く(描く)等の作業を行います.
|




触覚メディア・ビデオ伝送システム
|
触覚メディア・ビデオ伝送システムは,ある利用者の手元にある実際の物体の触感を,遠隔地にいる利用者に伝えます(下図参照).下図は,ルービックキューブに触っている様子を示しています.
マスタ端末の利用者が実際の物体に触ったときの触感と,触っている様子をビデオでスレーブ端末の利用者に伝える場合と,スレーブ端末の利用者がマスタ端末のところにある実際の物体のビデオを見ながら,主体的にその物体に触り,触感を得る場合の二通りを扱っています.前者の場合には,触覚メディアが片方向に伝送されるのに対して,後者の場合には,両方向に伝送されます.従って,後者の場合の方がインタラクティブ性が要求されます.
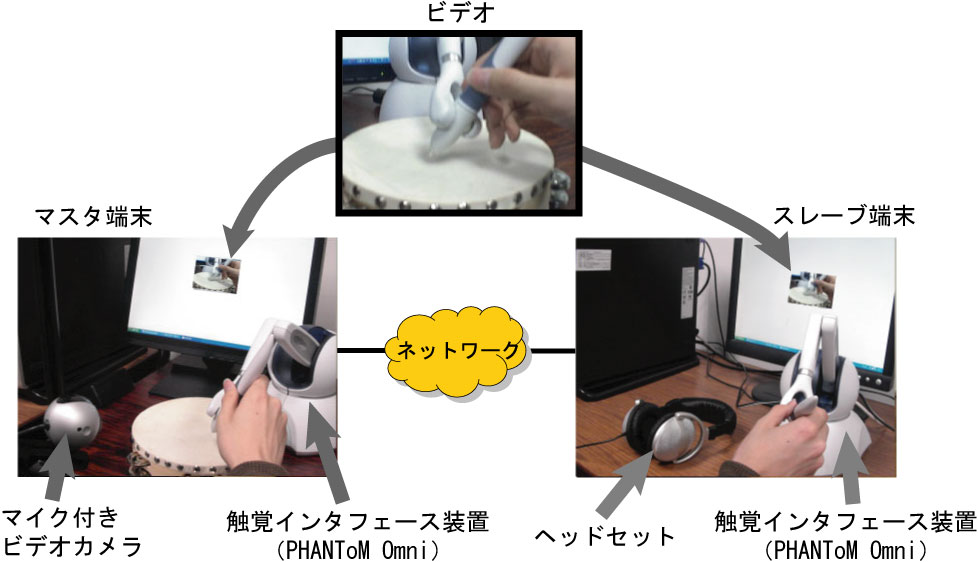
この他,このシステムにサウンドを追加して,触覚メディア・サウンド・ビデオ伝送システム(下図参照)を構築し,ネットワーク遅延の影響の調査を行っています.下図は,タンバリンを叩いている様子を示しています.
今後,より高品質に触感を伝える方法を検討する予定です. |

嗅覚・触覚メディア伝送システム
|
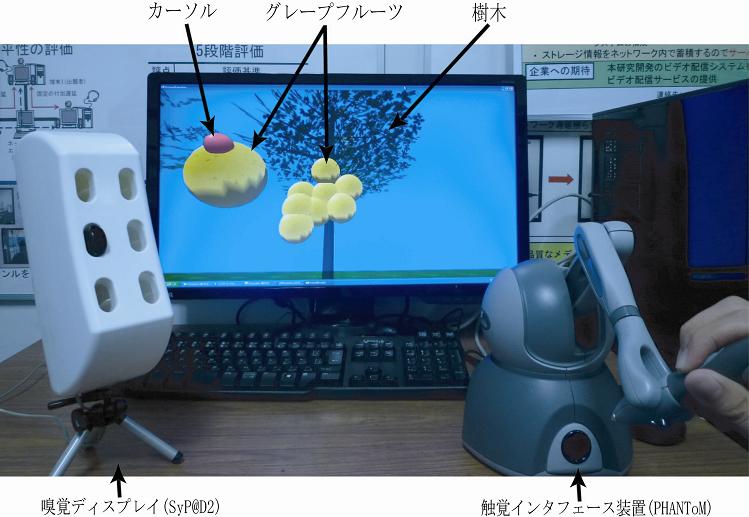
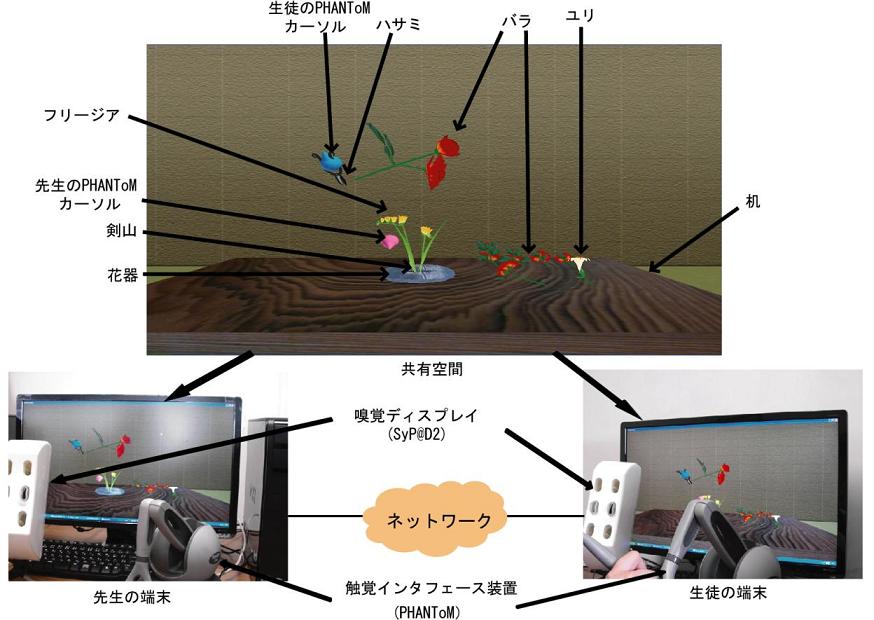
嗅覚・触覚メディア伝送システムは,香り,反力をそれぞれ提示する嗅覚ディスプレイ(SyP@D2),触覚インタフェース装置を用いて,ネットワークを介して複数の利用者間で作業空間を共有することができます.そのようなシステムの例として,嗅覚・触覚メディア提示システムと遠隔生け花システムを扱っています.
嗅覚・触覚メディアなどをネットワークを介して伝送すると,ネットワーク遅延やその揺らぎによって,メディア間同期誤差が発生する可能性があります.このシステムを用いて,嗅覚・触覚メディアの出力タイミングを変化させ,香りと反力の間(嗅覚及び触覚メディア間)の同期誤差の影響を明らかにしています.このシステムはスタンドアロンですが,ネットワーク化し,ネットワーク遅延やその揺らぎ,パケット欠落に対するQoS制御を検討しています.
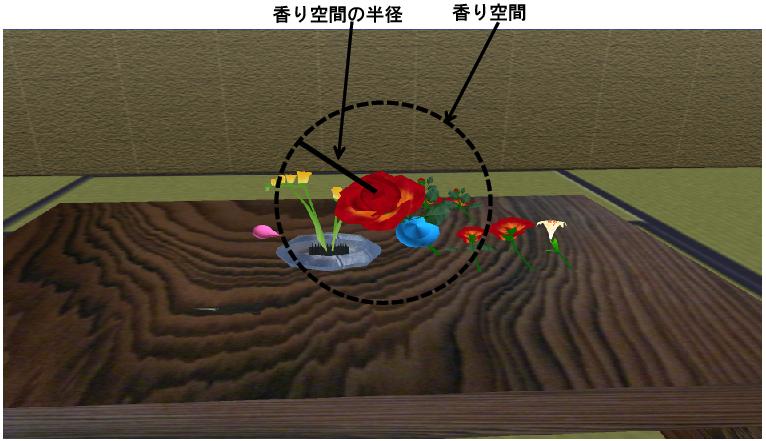
花の香りは,花冠を中心として,一定距離まで届くとします.即ち,香りの届く範囲は,下の図に示すような球(香り空間と呼ぶ)となります.先生または生徒の視点が香り空間に入ると,花の香りが感じられます.
ネットワークを介して,臨場感の高い生け花を実現するためのQoS制御として香りの動的出力タイミング制御などを提案しています. |
ネットワーク型リアルタイムゲーム
|
ネットワーク型リアルタイムゲームとして,レーシングゲームとシューティングゲーなどを検討対象としています.ネットワーク型レーシングゲームでは,利用者は,自分の車を操作して,対戦相手の車と競争します. ネットワーク型シューティングゲームでは,自分の機体(ファイター)を移動しながら,対戦相手の機体を撃ちます.また,撃たれないように機体を障害物(ビルディング)の後ろに隠したりします.
触覚メディアを利用したネットワーク型ゲームとして,下の図に示すように,二人の利用者が触覚インタフェース装置を用い,仮想空間内のオブジェクト(剛体の立方体)を操作し,目標物体を消去する回数を競います.各利用者は,触覚インタフェース装置カーソルで,各自のオブジェクトを持ち上げ,目標物体を内包するように移動させます.目標物体は,どちらかのオブジェクトに内包されると消滅し,ランダムに決定される新たな場所に表示されます.因果関係,一貫性,及び利用者間の公平性を維持することが要求されます.
ゲームの画面と一緒に,利用者の音声やビデオを出力することにより,更に臨場感のあるゲームを実現することができます.
この他,嗅覚・触覚メディア提示システムを拡張した果物狩り競争ゲームも扱っています. |




力覚フィードバックを用いた遠隔ロボットシステム
|
一人の利用者が触覚インタフェース装置を用いて,力覚センサを有する遠隔の産業用ロボットを操作する,力覚フィードバックを用いた遠隔ロボットシステムを構築し,システムの安定化と高品質化を狙い,安定化制御とQoS制御の研究を行っています.
小さな文字を書いたり,柔らかさの異なるいくつかのボールを押す作業を扱い,ネットワーク遅延などが大きくなっても,文字を書くときに感じる筆圧や,ボールを押すときの柔らかさを正確に伝送するための制御を検討しています.針の穴に糸を通せるような精度の高い制御を実現します.
また,システムを二つ用いて,物体を一緒に運んだり,手渡したりする協調作業を行い,そのときに要求される時空間同期制御(同じ時間的タイミングで,同じ高さや角度で動作させる制御)を検討しています.移動可能なロボットを操作することも想定し,ロボットアームを動かしながら手渡すことなども実現しています.大きな力が物体に加わり,物体が破損するようなことがないように作業できることが必要です.
今後は,実際に移動可能なロボットを遠隔から操作することを考えています. |



|
この他,当研究室では,以下の研究も行ってきました. |
触る分散仮想博物館
|
触る分散仮想博物館では,下図に示すように,利用者は触覚インタフェース装置を用いて展示物(エジプトのミイラ像,恐竜の化石,ゴッホのひまわり)に触りながら,触っている箇所の説明を自動的に聞くことができます.また,オブジェクトの重さを感じるため,そのオブジェクトを持ち上げて動かすこともできます.さらに,一人の説明員がアバタとして,展示物の向きを変えながら,音声・ビデオ等を用いて説明します.複数の利用者は,展示物に触りながら,その説明を聞くとともに,説明員に質問を行ったりします.
|

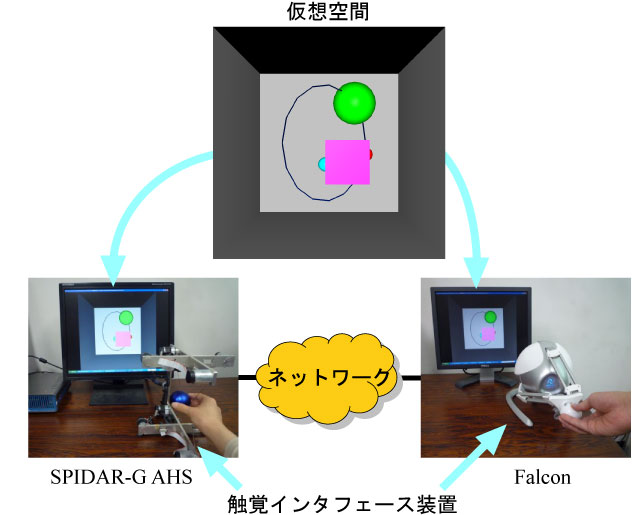
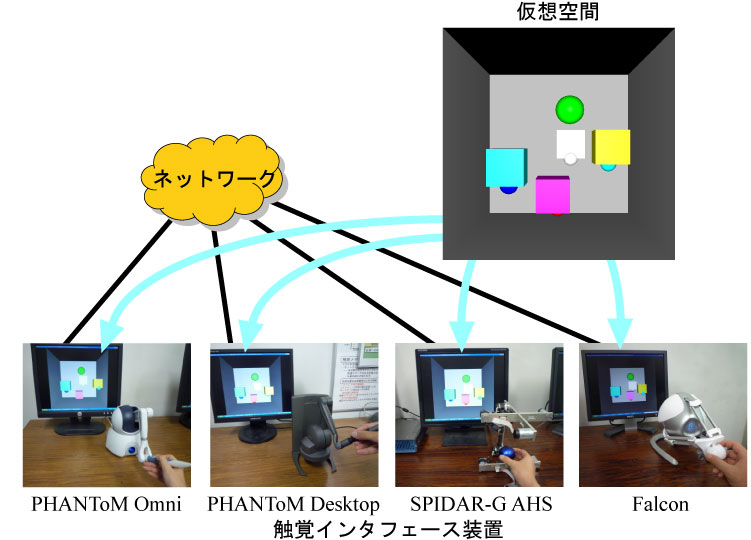
異種触覚インタフェース装置間の相互接続
|
作業空間の大きさ等の仕様が異なる触覚インタフェース装置を相互接続する場合,いずれかの装置において,仮想空間内に作業を行えない領域が存在する等の問題が発生します.そこで,各装置の作業空間を仮想空間にマッピングすることで,この問題を解決することができます.協調作業と競合作業に対して,いくつかのマッピング方法を検討しています.
下図では,四人の利用者が触覚インタフェース装置を用い,仮想空間内のオブジェクト(剛体の立方体)を操作し,目標物体を消去する回数を競う作業の様子を示しています.各利用者は,カーソルで各自のオブジェクトを持ち上げ,目標物体を内包するように移動させます.目標物体は,いずれかのオブジェクトに内包されると消滅し,ランダムに決定される新たな場所に表示されます.
今後,さらに多様なアプリケーションを研究対象とする予定です. |
|
以上のアプリケーションにおいては,複数のメディアが一緒に扱われるだけでなく,時間的に相互に関係付けられています.また,インタラクティブ性が重要であり,ネットワーク遅延に対する制約が厳しくなっています. |