Research on Networked Multimedia
≫ English page
因果順序制御
|
因果順序とは,時間的な前後関係を表します.
この図では,端末1及び2のMUの発生時間と,サーバでのMUの到着及び出力時間を示しています.Δの値は,100msに設定されています. |

Dead-reckoning(推測航法)
|
アバタ,オブジェクト,及び機体等の位置情報のトラヒック制御の有効な手法の一つにDead-reckoning (推測航法)があります.
特に,触覚メディアに対しては,高品質な反力を利用者に提示するために,オブジェクトの位置情報が1kHz程度のレートで転送されますので,この制御は重要です.
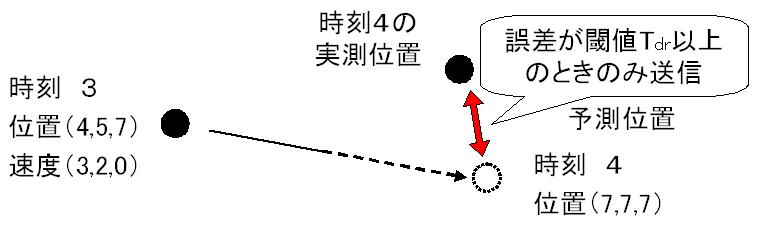
上の図では,飛んでいるボールの位置を予測しています. 一次予測では,最後に受信(送信)したMU内の位置とその時の速度から現在の位置を予測します. すなわち,
によって,位置を予測します. そして,予測位置と現在位置との比較を行います. その結果,予測誤差がある閾値Tdrを越えた場合にのみ現在の位置情報を送信します. この場合には,予測誤差の修正(補正)を行います. 受信側では,送信側と同じ方法を用いて位置予測を行います. そして,位置情報を新たに受信すると,補正を行います.
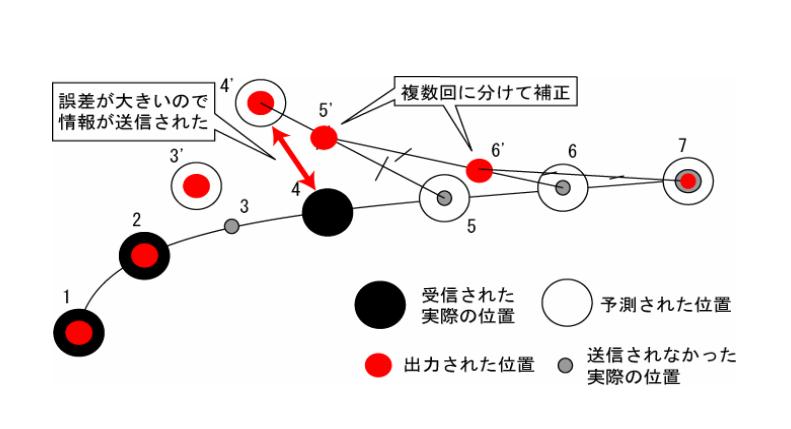
上の図では,予測誤差の修正(補正)をしています. 補正では,誤差の修正を一度に行うと,出力品質が大きく劣化する可能性がありますので,複数回に分けて行われます. この図では,4番目のMUでは閾値Tdrよりも大きくなっており,実際に送信されています. その後,複数回に分かれて補正が行われており,7番目のMUで予測位置に出力されています. |
反力の適応制御
|
反力の適応制御は,ネットワーク遅延に応じて,利用者に提示される反力の計算に用いられる弾性係数を動的に変更します.
また, 反力だけでなく,オブジェクトに加えられる力も制御します.
具体的には,ネットワーク遅延が大きいほど,弾性係数を小さくします.
Ks : 弾性係数(バネ係数)
ネットワーク遅延が増大すると,x の値が大きくなりますので,この式によると,利用者に与えられる反力が大きくなり,触覚インタフェース装置の操作が困難となります.例えば,ネットワーク遅延揺らぎの吸収のために,メディア同期制御によって,触覚メディアをバッファリングすることは,バッファリング遅延をもたらしますので,必ずしも好ましくありません.このような理由から考案されたものが反力の適応制御です.
|


誤り制御
|
触覚を利用した遠隔習字システムでは,パケット欠落などにより,文字の形状の劣化が描画の速度の大きい「はね」や「払い」の部分に現れることがわかっています.
そのときの位置情報が失われると,文字の形が大きく損なわれるため,その情報は重要です.
そこで,パケット欠落から重要な情報を守るため,重要度を考慮した誤り制御方式を提案しています.
|
